Optimiziranje performansi sa MPU-6050: Podešavanje, kalibracija i aplikacije
2024-04-25
9216
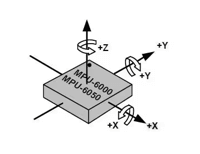
MPU-6050 Da li je prva svjetska integrirana komponenta prerade 6-osni pokreta koja integrira 3-os-žiroskop, 3-os-akcelerometar i skalabilni digitalni procesor pokreta (DMP).Svrha korištenja je da se pribavi ugao nagiba objekta koji se mjeri (poput Quadcopter-a, balansirajućih automobila) na X, Y i Z i z ugao, ugao naziva, ugao i zglob.Pročitali smo šest podataka MPU-6050 (Tro-osi ubrzane vrijednosti za ubrzanje i trostruko-osovinu kutnu vrijednost oglasa) putem I2C sučelja.Nakon podnožja Fusion Obrada, nagib nagiba, kotrljanja i zupčanika mogu se izračunati.Kao usmjerena referenca za mjerne vrijednosti, definicija smjera koordinate senzora je prikazana na donjoj slici, koja slijedi princip koordinatnog sustava desne koordinate (to jest desni palac ukazuje na pozitivan smjer X-Os, indeksni prst ukazuje na pozitivan smjer Y-osi, a srednji prst ukazuje na pozitivan smjer Z-osi. Smjer).
Katalog
Sa svojim namjenskim I2C senzorskim sabirnicom, MPU-6050 može primati unos izravno iz vanjskog kompasa sa 3 os, pružajući punu 9-os-motionfusion ™ izlaz.Eliminira problem odstupanja između kombiniranog žiroskopa i vremenske trake akceleratora i značajno smanjuje prostor za pakiranje u odnosu na višekomponentne rješenja.Kada se poveže na troosni magnetometar, MPU-60X0 može pružiti punu izlazu fuzijskog fsuzije sa 9 osi u glavnom I2C ili SPI priključku (imajte na umu da je SPI port dostupan samo na MPU-6000).
Alternativa i ekvivalenti
- MPU-3300
- MPU-6000
- MPU-6500
Proizvođač MPU-6050
Proizvođač MPU-6050 je TDK.Nakon dva osnivača TDK-a, dr. Yogoro Kato i Takei Takei, izmislili su feritu u Tokiju, osnovali su Tokio Denkikagaku Kogyo K.K.1935. Kao globalna marka industrije elektronike, TDK je uvijek održavao dominantan položaj u poljima elektronskih sirovina i elektroničkih komponenti.TDK-ov opsežni i inovacijski portfelj proizvoda pokriva pasivne komponente kao što su keramički kondenzatori, aluminijski elektrolitički kondenzatori, filmski kondenzatori, magnetski proizvodi, visokofrekventni komponente, piezoelektrični i zaštitni uređaji (poput temperature i pritiska)Magnetni i MEMS senzori), itd. Pored toga, TDK pruža i napajanje i energetske uređaje, magnetne glave i druge proizvode.Njegovi brendovi proizvoda uključuju TDK, EPSCO, Invense, Micronas, Tronics i TDK-lambda.
Interni blok dijagram MPU-6050
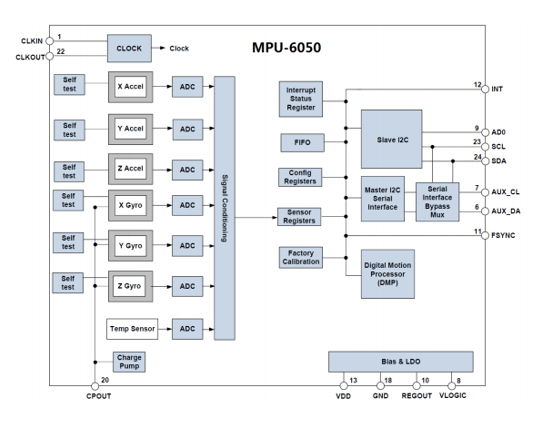
Među njima, SCL i SDA su sučelja IIC povezana sa MCU-om, a MCU kontrolira MPU-6050 putem ovog IIC sučelja.Tu je i IIC sučelje, naime aux_cl i aux_da.Ovo sučelje se može koristiti za povezivanje vanjskih robovskih uređaja, poput magnetskih senzora, kako bi se formirao senzor devet osovina.Vlogic je IO port napon.Ovaj PIN može podržati najmanje 1.8V.Obično ga povezujemo direktno na VDD.AD0 je PIN adresa kontrola sučelja Slave IIC (spojen na MCU).Ovaj PIN kontrolira najniži dio IIC adrese.Ako je povezan s GND-om, IIC adresa MPU-6050 je 0x68;Ako je povezan s VDD-om, to je 0x69.Imajte na umu da adresa ovdje ne uključuje najniži dio prijenosa podataka (najniži bit se koristi za predstavljanje operacija čitanja i pisanja).Na MWBALadedStc15, AD0 je povezan sa GND-om, tako da je IIC adresa MPU-6050 0x68 (isključujući najniži bit).
Inicijalizirajte IIC sučelje
MPU-6050 koristi IIC za komunikaciju sa STC15, tako da moramo inicijalizirati SDA i SCL linije podataka povezane na MPU-6050.
Poništi MPU-6050
Ovaj korak obnavlja sve registre unutar MPU-6050 na njihove zadane vrijednosti, što se postiže pisanjem 1 do Bit7 registra upravljanja napajanjem 1 (0x6B).Nakon resetiranja, Registar upravljanja napajanjem 1 bit će vraćen na zadanu vrijednost (0x40), a ovaj se registar naknadno mora postaviti na 0x00 da bi se probudio MPU-6050 i stavio ga u normalno stanje.
Postavite puni raspon ugaone senzora brzine i senzora Gyro) i ubrzanja
U ovom koraku postavljamo puni raspon (FSR) dva senzora kroz registar konfiguracije žiroskopa (0x1b) i registru konfiguracije senzora ubrzanja (0x1c).Obično postavljamo puni raspon žiroskopa na ± 2000dps i puni raspon akcelerometra do ± 2g.
Postavite ostale parametre
Evo, moramo konfigurirati i sljedeće parametre: Isključite prekide, onemogućite AUX I2C sučelje, onemogućite FIPO, postavite brzinu uzorkovanja žiroskopa i konfigurirajte digitalni filter niskog prolaza (DLPF).Budući da ne koristimo prekide za čitanje podataka u ovom poglavlju, funkcija prekida treba isključiti.Istovremeno, jer ne koristimo AUX I2C sučelje za povezivanje ostalih vanjskih senzora, moramo zatvoriti i ovo sučelje.Te se funkcije mogu kontrolirati putem prekida Enable Registar (0x38) i registra korisnika korisnika (0x6a).MPU-6050 može koristiti FIO za pohranjivanje podataka senzora, ali u ovom poglavlju nismo koristili, tako da se svi FIFO kanali moraju zatvoriti.To se može kontrolirati putem FIFO-a Omogući registar (0x23).Prema zadanim postavkama, vrijednost ovog registra je 0 (to jest, FIFO je onemogućeno), tako da možemo direktno koristiti zadanu vrijednost.Stopa uzorkovanja žiroskopa kontrolirana je registracijom razdjelničkog uzorkovanja (0x19).Normalno, postavljamo ovu stopu uzorkovanja na 50. Konfiguracija digitalnog filtra za niskopropusni filtar (DLPF) završava se putem konfiguracijskog registra (0x1A).Generalno gledano, postavit ćemo DLPF na pola propusne širine da bi se uravnotežila tačnost podataka i brzinu odgovora.
Konfigurirajte izvor satova sistema i omogućite kutni senzor brzine i senzor ubrzanja
Postavka izvora sistema sistema ovisi o registru upravljanja napajanjem 1 (0x6B), gdje najniže tri bita ovog registra određuju izbor izvora sata.Prema zadanim postavkama, ova tri bita postavljena su na 0, što znači da sistem koristi interni 8MHz RC oscilator kao izvor sata.Međutim, kako bi se poboljšala tačnost sata, često smo ga postavili na 1 i odabiremo kroskop X-osi PLL kao izvor sata.Pored toga, omogućavanje angajski senzor brzine i senzor ubrzanja takođe je važan korak u procesu inicijalizacije.Obje operacije se provode kroz registar upravljanja napajanjem 2 (0x6C).Jednostavno postavite odgovarajući bit na 0 da biste aktivirali odgovarajući senzor.Nakon završetka gore navedenih koraka, MPU-6050 može ući u normalan radni status.Ovi registri koji nisu posebno postavljeni usvojit će zadane postavke vrijednosti od strane sustava.
Kako funkcionira MPU-6050?
Gyro senzor
Senzor je opremljen Gyrom iznutra, što će uvijek ostati paralelno s početnim smjerom zbog žiroskopskog efekta.Stoga možemo izračunati smjer i ugao rotacije otkrivanjem odstupanja Gyro iz početnog smjera.
Senzor akcelerometra
Senzor akcelerometra je uređaj koji može mjeriti ubrzanje i djeluje na osnovu načela piezoelektričnog efekta.Tijekom ubrzanja senzor mjeri inercijalnu silu koja se primjenjuje na masovni blok, a zatim izračunava vrijednost ubrzanja pomoću Newtonovog drugog zakona.
Digitalni procesor pokreta (DMP)
DMP je modul za obradu podataka u čipu MPU6050 koji ima ugrađeni algoritam filtriranja Kalmana za sticanje podataka iz žiroskopa i senzora za ubrzanje i obradu izlaznih kvarca.Ova značajka uvelike smanjuje opterećenje perifernog mikroprocesora i izbjegava tegozna proces filtriranja i fuzija podataka.
Napomene:
Quartnions: Quartnions su jednostavni superkomplex brojevi.Složeni brojevi sastoje se od stvarnih brojeva plus zamišljenu jedinicu I, gdje sam ^ 2 = -1.
Gdje se koristi MPU-6050?
- Igračke
- Slušalica i prenosivi igranje
- kontroleri igre na temelju pokreta
- Blurfree ™ tehnologija (za video / stabilizaciju fotografija))
- Airsign ™ tehnologija (za sigurnost / provjeru autentičnosti)
- InstantgestEgeste ™ IG ™ prepoznavanje gesta
- Nosivi senzori za zdravlje, fitnes i sport
- Igra i aplikativni okvir omogućeni pokreta
- MotionCommand ™ tehnologija (za gestu kratke rezove)
- Usluge zasnovane na lokaciji, interesantne točke i mrtvo obračun
- 3D daljinski upravljač za Internet povezane DTVS i postavite gornje kutije, 3D miševi
- TouchAwhere ™ tehnologija (za "bez dodira" UI aplikacija / navigacija)
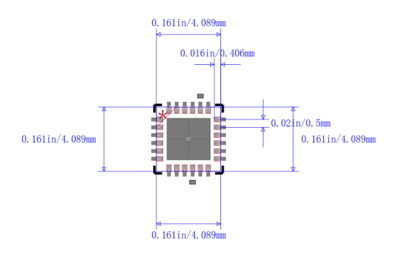
Paket MPU-6050
Kako smanjiti buku MPU-6050?
Možemo poduzeti sljedeće načine za smanjenje buke MPU-6050.
Koristite kalibrirane senzore
Kalibracija akcelerometra i žiroskopa MPU-6050 mogu eliminirati pristranost i pogrešku samih senzora, čime se smanjuje učinak buke.Proces kalibracije obično se sastoji od dvije faze: statička kalibracija i kalibracija pokreta.
Proces filtriranja hardvera
Dodavanje kondenzatora filtra u dalekovod MPU-6050 može umanjiti utjecaj buke napajanja na senzor.U međuvremenu, tokom izgleda PCB-a trebali bismo pokušati držati MPU-6050 od potencijalnih izvora smetnji, poput visokofrekventnih linija signala i komponenta velike snage.
Obrada filtriranja softvera
Nakon prikupljanja sirovih podataka iz MPU-6050, možemo dodati vezu za filtriranje softvera da bi prethodno obradili početne podatke za uklanjanje smetnji koje izazivalo buku.Najčešće korištene metode filtriranja softvera uključuju srednje filtriranje, srednje filtriranje, kalmano filtriranje i tako dalje.
Koristite interni filter sa niskim prolazom
MPU-6050 ima interni integrirani digitalni filter sa malim prolazom koji se može koristiti za smanjenje visokofrekventne buke postavljanjem njenog frekvencije rezanja.Konkretno, možemo postaviti frekvenciju rezonacije digitalnog filtra modificiranjem CONFIG registra MPU-6050 za uklanjanje visokofrekventne buke uzrokovane klima uređajem.
Izračun putanje pokreta MPU-6050
MPU-6050 je šestososi akcelerometar i žiroskop senzor koji se može koristiti za mjerenje kretanja i stava objekata.Proračun putanje pokreta zasnovan na MPU-6050 može se realizirati sljedećim koracima:
Prvi korak je čitanje podataka senzora.Moramo pročitati podatke za akcelerometar i žiroskop iz MPU-6050 senzora koristeći odgovarajuće upravljačke funkcije i funkcije biblioteke.Ti se podaci obično izlažu u digitalnom formatu, tako da je potrebno neko pretvorba i kalibracijski rad koji će ih pretvoriti u stvarna mjerenja u fizičkim jedinicama.
Drugi korak je izračunavanje ubrzanja.Prvo moramo obraditi podatke s akcelerometara da bismo izveli ubrzanje objekta u svakoj osi.Nakon toga, kako bi se izračunala brzina i premještanje objekta u svakoj osi, moramo integrirati podatke ubrzanja.Tehnike numeričke integracije, poput Eulerove metode ili metode Lunger-Kutta, često se koriste u ovom procesu kako bi se osigurala tačnost proračuna raseljavanja.
Treći korak je izračunavanje ugla brzine.Korištenje podataka žiroskopa, kutna brzina objekta u svakoj osi može se izračunati.Opet, ovi podaci treba kalibrirati i pretvoriti kako bi se dobila kutna brzina u stvarnim fizičkim jedinicama.
Četvrti korak je izračunavanje rotacije.Integriranjem kutnih podataka brzina, može se izračunati ugao rotacije objekta u svakoj osi.To se može učiniti pomoću tehnika numeričke integracije poput eulerove metode ili metode Longe-Kutta za izračunavanje ugla.
Peti korak je spajanje podataka.Kombinujemo podatke iz akcelerometri i žiroskopa da bismo dobili kompletan stav i informacije o položaju objekta.To se može učiniti pomoću algoritama kao što su solver sa stavom u obliku kvartanja ili solver Eulera ugaonog eul.
Šesti korak je vizualizaciju rezultata.Kompjuterizirane TRAKTOR TRACK TRACK COME u skup točaka u 3D koordinatnom sustavu i prikazujemo je koristeći odgovarajuće alate za vizualizaciju za intuitivnije razumijevanje zahtjeva za prijedlog i promjene stava na zahtjev objekta.
Često postavljana pitanja [FAQ]
1. Koliko je tačan MPU6050?
Stečeni rezultati pokazali su dovoljnu tačnost manja od 1% i pouzdanost, osiguravajući pravilno dimenzioniranje osovine lifta i visokih standarda industrije lifta.
2. Kako čitati podatke iz MPU6050?
Da biste pročitali interne MPU6050 registre, master šalje stanje starta, nakon čega slijedi I2C adresa robova i bit za pisanje, a zatim se registruj adresa koja će se čitati.
3. Gdje se koristi MPU6050?
U nosivim praćenjem zdravlja, uređajima za praćenje fitnesa.U dronovima i quadcopters, MPU6050 se koristi za kontrolu položaja.Koristi se u kontroli robotske ruke.Uređaji za kontrolu geste ruku.
4. Je li MPU6050 IMU?
MPU6050 IMU senzor blok čita podatke iz senzora MPU-6050 koji je povezan na hardver.Blok izlazi ubrzanje, kutna stopa i temperaturu duž osi senzora.
5. Koja je obrada MPU6050?
Ovo je na brodski procesor MPU6050 koji kombinira podatke koji dolaze iz akcelerometra i žiroskopa.DMP je ključ za korištenje MPU6050 i detaljno se objašnjava.Kao i kod svih mikroprocesora, DMP je potreban firmver kako bi se pokrenuo.
Funkcijski test.Najviši ekonomični proizvodi i najbolja usluga je naša vječna posvećenost.
Vrući članak
- Su CR2032 i CR2016 zamjenjivi
- MOSFET: Definicija, princip rada i izbor
- Instalacija i testiranje releja, Tumačenje dijagrama ožičenja releja
- CR2016 vs. CR2032 Koja je razlika
- NPN vs. PNP: Koja je razlika?
- ESP32 VS STM32: Koji je mikrokontroler bolji za vas?
- LM358 Dual operativni pojačalo sveobuhvatni vodič: PILOUTS, Kružni dijagrami, ekvivalenti, korisni primjeri
- CR2032 vs DL2032 vs CR2025 Vodič za usporedbu
- Razumijevanje razlika ESP32 i ESP32-S3 Tehničke i performansne analize
- Detaljna analiza kruga serije RC
 Istraživanje mogućnosti i primjene NRF24L01 komunikacijski čip
Istraživanje mogućnosti i primjene NRF24L01 komunikacijski čip
2024-04-25
 MMBT3904 NPN tranzistor: njegove specifikacije, sveobuhvatni vodič za aplikaciju i MMBT3904 vs. MMBT5551
MMBT3904 NPN tranzistor: njegove specifikacije, sveobuhvatni vodič za aplikaciju i MMBT3904 vs. MMBT5551
2024-04-25
Broj vrućeg dijela
 GRJ21BR71H474KE01L
GRJ21BR71H474KE01L C2012C0G2W222J085AA
C2012C0G2W222J085AA GCM1885C1H6R5DA16D
GCM1885C1H6R5DA16D 12063C183KAT2A
12063C183KAT2A C3216X5R1A335K/0.85
C3216X5R1A335K/0.85 TAJC336M006SNJ
TAJC336M006SNJ AXT410124
AXT410124 M39006/22-0133
M39006/22-0133 MC94MX21DVKN3
MC94MX21DVKN3 RT0805DRD07220RL
RT0805DRD07220RL
- RT0805DRD07120KL
- CHS-02TB
- 6MBI30FA-060
- 6MBI600UE-060A-03
- 7MBR25U4P-120
- VI-MUL-CQL
- SN74VMEH22501ZQLR
- T491D336K016AG48527280
- T491C336K010ZTAU00
- 1N5366BRLG
- TPA0103PWP
- NTP85N03G
- LT3466EDD#TRPBF
- CDCM61001RHBR
- SN761681DBT
- T495B106M016ZTA2K5
- AP60T03GH
- G5CA-1A-E-12VDC
- HMC194MS8GETR
- ICS952703BFLF
- LP2985ITPX-2.6
- M30626MJP-A11GP
- MB3807APF
- RD38F3350LLZDQ0
- S23306W519
- S470MSC63ZFEQRCV
- SC111528CAF
- SC1158CS
- UMA1021M/C2
- UPD70108HG-16
- XC5204-5PQG160C
- EDJ8416E6MB-GNL-F
- K7I161882B-EC25
- LC723781
- NFP-3050-S-N-A3
- SP5769SL
- AT93C86-10SU
- MC9S12C32MPB16
- ACS711KLCTR-12AB